
L298N Hoja de datos del controlador de motor | Puente H Arduino
- Marcas: STMicroelectrónica
- Descargar: Hoja de datos del L298N en PDF
- Precio: consulta
- En stock: 17,039
- Configuración de salida: Medio puente (4)
- Aplicaciones: Motores de CC, relés, solenoides, motores paso a paso
- Interfaz: Lógica
- Paquete: Multiwatt-15 (cables verticales, doblados y escalonados)


Envío GRATUITO para pedidos superiores a HK$250.00

Respuesta rápida, cotización rápida.

Envío rápido, sin preocupaciones posventa.

Canal original, garantía de los productos auténticos.
How to Use TB6612FNG H-Bridge Motor Driver | TB6612FNG Better Than L298N?
L298N
El L298N es un práctico controlador de motor que te resultará muy útil, especialmente si te dedicas a construir robots o proyectos de automatización. Puedes usarlo fácilmente para controlar dos motores de CC simultáneamente, o incluso un solo motor paso a paso bipolar. Una gran ventaja de este controlador es su amplio rango de voltaje: puede funcionar desde 4,5 voltios hasta 46 voltios, lo que cubre la mayoría de las necesidades de los aficionados.
Cada canal proporciona cómodamente hasta 2 A de corriente continua, con un pico de 3 A, lo que proporciona potencia de sobra para motores ligeramente más grandes. Lo mejor del L298N es su protección integrada contra sobrecalentamiento y cortocircuitos, que evita que se dañe la configuración. Además, es compatible con lógica TTL y CMOS, lo que facilita enormemente su conexión a microcontroladores como Arduino o Raspberry Pi.
Con soporte PWM, también obtienes un control preciso sobre la velocidad y dirección del motor, lo que es perfecto para proyectos detallados.
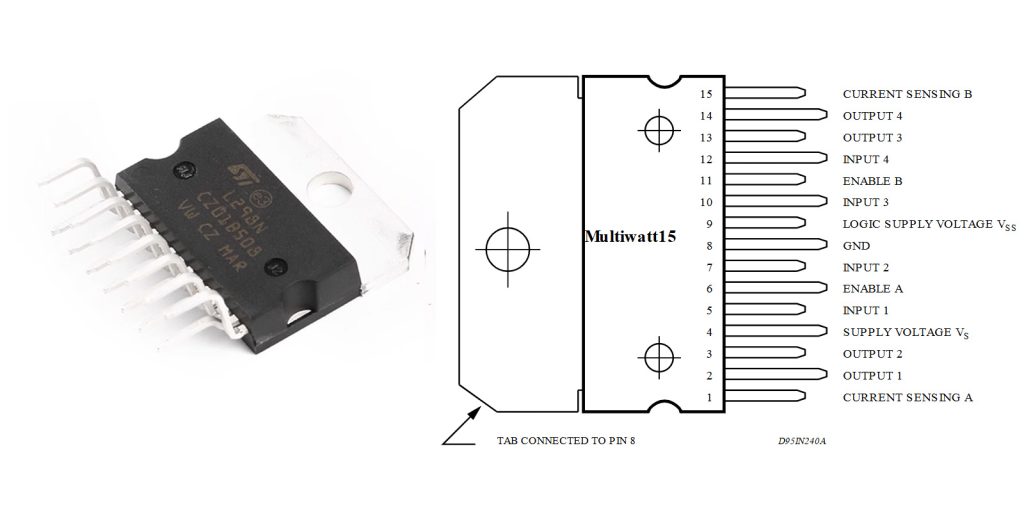
Distribución de pines del L298N

Aquí está la distribución de pines para el IC del controlador del motor L298N presentada claramente en una tabla:
| Número PIN | Nombre del pin | Descripción/Función |
|---|---|---|
| 1 | Sentido de corriente A | Detección de corriente del canal A |
| 2 | Salida 1 | Salida del canal A (terminal del motor) |
| 3 | Salida 2 | Salida del canal A (terminal del motor) |
| 4 | Vs | Voltaje de suministro del motor (4,5 a 46 V) |
| 5 | Entrada 1 | Entrada lógica para la salida 1 |
| 6 | Habilitar A | Habilitar pin para el canal A (control de velocidad PWM) |
| 7 | Entrada 2 | Entrada lógica para la salida 2 |
| 8 | Tierra | Suelo |
| 9 | Vss | Voltaje de la fuente de alimentación lógica (+5 V típico) |
| 10 | Entrada 3 | Entrada lógica para la salida 3 |
| 11 | Habilitar B | Habilitar pin para el canal B (control de velocidad PWM) |
| 12 | Entrada 4 | Entrada lógica para la salida 4 |
| 13 | Salida 3 | Salida del canal B (terminal del motor) |
| 14 | Salida 4 | Salida del canal B (terminal del motor) |
| 15 | Sentido de corriente B | Detección de corriente del canal B |
Uso y precauciones de pinout:
Al configurar el controlador de motor L298N, asegúrese de que la fuente de alimentación del motor (Vs) se mantenga dentro del rango de voltaje recomendado, de 4,5 V a 46 V. Normalmente, la fuente de alimentación lógica (Vss) funciona mejor alrededor de 5 V para un rendimiento estable. Si necesita un control preciso de la velocidad del motor, utilice los pines de habilitación (Enable A/B) con señales PWM; esto le proporciona un control mucho mejor.
Recuerda siempre conectar correctamente a tierra tu configuración y evitar cortocircuitos en las salidas, ya que esto puede dañar gravemente tu circuito integrado. Además, controla el consumo actual; si estás forzando el controlador casi al límite, asegúrate de usar un disipador de calor u otro método de refrigeración. Así, evitarás el sobrecalentamiento y prolongarás la vida útil de tu chip.
Equivalente de L298N



Distribución de pines equivalente a L298N
A continuación se muestra una tabla que compara el L298N con circuitos integrados de controlador de motor equivalentes en el mismo paquete o en uno similar:
| Parámetro | L298N | L293D | SN754410 | VNH2SP30 |
|---|---|---|---|---|
| Voltaje de suministro (Vs) | 4,5–46 V | 4,5–36 V | 4,5–36 V | 5,5–16 V |
| Corriente continua | 2 A por canal | 0,6 A por canal | 1 A por canal | 14 A (pico 30 A) |
| Corriente máxima | 3 A | 1.2 A | 2 A | 30 A (ráfagas cortas) |
| Tipo de paquete | Multiwatt-15, PowerSO20 | DIP-16, SOIC-16 | DIP-16, SOIC-16 | MultiPowerSO-30 |
| Protección térmica | Sí | Sí | Sí | Sí |
| Diodos internos | No (se requieren diodos externos) | Sí | Sí | MOSFET integrado (no requiere diodos) |
| Voltaje de entrada lógica | TTL, CMOS (compatible con 5 V) | TTL, CMOS (compatible con 5 V) | TTL, CMOS (compatible con 5 V) | CMOS (compatible con 3,3 V o 5 V) |
Al buscar un reemplazo para su controlador de motor L298N, elija siempre uno que se ajuste a sus necesidades específicas de voltaje y corriente. Opciones como el L293D o el SN754410 pueden parecer similares, pero tenga en cuenta que manejan corrientes más bajas y rangos de voltaje más estrechos. Si utiliza motores potentes, considere un modelo como el VNH2SP30: ofrece mayor capacidad de corriente, MOSFET integrados y no necesitará diodos externos. Lo más importante es comprobar siempre que el reemplazo sea compatible con su configuración lógica actual y que soporte bien el calor. Esto garantiza que sus motores funcionen de forma suave y segura, evitando problemas de sobrecalentamiento.
Diagrama de cableado del controlador de motor l298n para Arduino y l298n


A continuación se explica cómo conectar y utilizar fácilmente su controlador de motor L298N con un Arduino Mega:
Alimenta todo con una batería externa USB de 5 V. Conéctala al puerto USB de tu Arduino Mega y suministra también 5 V a la entrada de 12 V del L298N (aunque normalmente se recomienda un voltaje más alto para asegurar que los motores funcionen correctamente con suficiente potencia).
Los dos motores de CC se conectan a las salidas del L298N (OUT1-OUT4) para un control independiente. Conecte los pines de Arduino (como 2-5 y 8-11) a las entradas del L298N y habilite los pines (IN1-IN4, ENA, ENB). Las señales PWM permiten ajustar la velocidad y la dirección de cada motor. Asegúrese de que ambas conexiones a tierra (Arduino y L298N) estén conectadas para garantizar la estabilidad.
l298n puente h dual
Descripción general del puente H doble L298N:
Si estás desarrollando proyectos con motores, el controlador de motor L298N es muy práctico. Te permite controlar fácilmente dos motores de CC a la vez o incluso un motor paso a paso. Una de las razones por las que te resultará útil es su durabilidad: soporta un uso intensivo sin problemas. Además, conectarlo a microcontroladores como Arduino o Raspberry Pi es muy sencillo, lo que te facilita mucho la configuración de tus proyectos de robótica o automatización.
Principio de funcionamiento:
Usar una configuración de puente H es una forma sencilla y eficaz de controlar el motor de CC en ambas direcciones. Básicamente, al cambiar la polaridad del voltaje en los terminales del motor, se puede hacer que gire hacia adelante, hacia atrás o detenerse por completo. Y si se usan señales PWM en los pines de habilitación, se tendrá un control preciso de la velocidad, lo que permite ajustar con precisión la velocidad del motor para cada proyecto.
l298n frente a l293d

A continuación se muestra una comparación detallada de los L298N y L293D Circuitos integrados de controladores de motor, destacando los parámetros importantes:
| Parámetro | L298N | L293D |
|---|---|---|
| Voltaje de suministro (Vs) | 4,5 V a 46 V | 4,5 V a 36 V |
| Corriente de salida (continua) | 2A por canal | 0,6 A por canal |
| Corriente máxima | 3A por canal | 1,2 A por canal |
| Temperatura de funcionamiento | -25°C a 130°C | -40°C a 85°C |
| Tipo de paquete | Multiwatt-15, PowerSO20 | DIP-16, SOIC-16 |
| Voltaje de entrada lógica | Compatible con TTL y CMOS | Compatible con TTL y CMOS |
| Protección térmica | Sí (Apagado térmico) | Sí (Apagado térmico) |
| Diodos internos | No (se necesitan diodos externos) | Sí (Diodos internos para flyback) |
| Control PWM | Sí (para control de velocidad del motor) | Sí (para control de velocidad del motor) |
| Costo | Generalmente más alto | Generalmente más bajo |
| Caso de uso | Aplicaciones de corriente más alta | Aplicaciones de corriente baja a media |
Resumen y precauciones para el reemplazo:
Si trabajas en un proyecto de alta potencia, el L298N es tu controlador ideal. Admite voltajes más altos (hasta 46 V) y mayor corriente (2 A por canal, 3 A de pico), lo que lo hace perfecto para motores más grandes que requieren mayor potencia y par. Ten en cuenta que no incluye diodos internos para la protección contra el flyback, por lo que deberás añadir diodos externos para la protección del motor.
Por otro lado, el L293D es más adecuado para motores más pequeños o cargas más ligeras. Admite voltajes más bajos (hasta 36 V) y corrientes más bajas (0,6 A por canal). Además, cuenta con diodos internos para protección contra el retorno, lo que significa que no es necesario agregar componentes adicionales para la seguridad del motor.
Al alternar entre estos dos, asegúrese de que el voltaje y la corriente se ajusten a sus necesidades. Si utiliza motores de mayor potencia, elija el L298N. Para proyectos más pequeños y de menor potencia, el L293D puede ahorrarle dinero.
Cómo conectar l298n a Raspberry Pi
Para que su controlador de motor L298N funcione con una Raspberry Pi, simplemente siga estos sencillos pasos:
-
Fuente de alimentación:
• Conecte el pin 12V+ (Vs) del L298N a una fuente de alimentación externa.
• Asegúrese de conectar el GND del L298N al GND tanto del Raspberry Pi como de la fuente de alimentación externa. -
Conexiones del motor:
• Conecte OUT1 y OUT2 a los terminales del Motor 1.
• Conecte OUT3 y OUT4 al motor 2. -
Conexiones GPIO:
• Conecte IN1 e IN2 del Motor 1 a los pines GPIO de Raspberry Pi (como GPIO17 y GPIO27).
• Para el motor 2, conecte IN3 e IN4 a los pines GPIO (por ejemplo, GPIO22 y GPIO23).
• Conecte ENA y ENB a 5 V para obtener energía constante o utilice pines GPIO para control de velocidad PWM. -
Instrucciones del motor de control:
Utilice la biblioteca GPIO de Python con comandos como GPIO.output(IN1, GPIO.HIGH) para establecer la dirección del motor (hacia adelante o hacia atrás).
Control de motor paso a paso l298n
El controlador de motor L298N se utiliza comúnmente para controlar motores paso a paso, especialmente en proyectos de robótica y automatización. A continuación, se explica brevemente su funcionamiento:
-
Conexiones del motor: Un motor paso a paso suele tener cuatro cables que se conectan a las terminales de salida del L298N (OUT1, OUT2, OUT3, OUT4). Estas conexiones controlan la rotación del motor paso a paso.
-
Señales de control: El L298N tiene dos pines de entrada (IN1, IN2, IN3, IN4) para cada bobina del motor. Al enviar diferentes combinaciones de señales ALTAS y BAJAS a estos pines, se puede controlar la dirección y los pasos del motor, obligándolo a moverse con precisión.
-
PWM para control de velocidad: El L298N también cuenta con pines de habilitación (ENA, ENB) que permiten usar señales PWM para controlar la velocidad de giro del motor. Ajustando el ciclo de trabajo de la señal PWM, se puede controlar la velocidad del motor.
-
Fuente de alimentación: Necesitará una fuente de alimentación externa para el motor paso a paso (generalmente 12 V), mientras que el lado lógico L298N funciona con 5 V, que pueden ser alimentados por un Arduino u otro microcontrolador.
Cómo funciona l298n
El L298N es básicamente un controlador de motor de doble puente H, muy útil para controlar motores, especialmente motores de CC o motores paso a paso. Considérelo como si tuviera dos circuitos de puente H independientes, cada uno capaz de controlar un solo motor. Normalmente, se conecta a un microcontrolador como un Arduino y se utilizan las señales de este para ajustar la velocidad (mediante PWM) y la dirección (modificando las señales de entrada en los puentes H). Además, cuenta con sus propios pines de alimentación y tierra, específicos para los motores, para que estos reciban suficiente energía sin sobrecargar el microcontrolador. Este chip se utiliza mucho en proyectos de robótica o automatización DIY, ya que simplifica enormemente el manejo de los motores.
Más como esto

TPIC6C596PWG4
Texas Instruments
TPIC6C596PW
Texas Instruments

MC14557BDWR2G
onsemi

74HCT595D,112
Nexperia USA Inc.

SN74AHC594D
Texas Instruments
CD4031BPWR
Texas Instruments
CD4035BPWR
Texas Instruments
CD74HCT166M
Texas Instruments
")
TC74HC165AP(F)
Toshiba Semiconductores y almacenamiento

SN74HC595ANSR
Texas Instruments

SN74LV166ADBR
Texas Instruments

BU4015BF-E2
Semiconductor Rohm
Añadir también al carrito

LE9520SDDTC
Tecnología de microchip

ISD4002-150P
Corporación de tecnología Nuvoton

LMV1089RL/NOPB
Texas Instruments

TAS5710PHPR
Texas Instruments

XR16M680IL32-F
MaxLinear, Inc.

ADS131B04QPWRQ1
Texas Instruments

MC68EN360VR33L
NXP Estados Unidos Inc.
MC507L
Motorola

GS9078ACNE3
Corporación Semtech
74C221
MICROSS/On Semiconductor
CD4056BMT
Texas Instruments

TXB0101DCKR
Texas Instruments
Productos relacionados
TPIC6C596PWG4
Texas Instruments
TPIC6C596PW
Texas Instruments
MC14557BDWR2G
onsemi
74HCT595D,112
Nexperia USA Inc.
SN74AHC594D
Texas Instruments
CD4031BPWR
Texas Instruments
CD4035BPWR
Texas Instruments
CD74HCT166M
Texas Instruments
TC74HC165AP(F)
Toshiba Semiconductores y almacenamiento
SN74HC595ANSR
Texas Instruments
SN74LV166ADBR
Texas Instruments
BU4015BF-E2
Semiconductor Rohm
CD4094BPW
Texas Instruments
SN74LV595AQPWRQ1
Texas Instruments

SN74LV166ADGVR
Texas Instruments

CD74HC595NSR
Texas Instruments
SN74LV595ANSR
Texas Instruments
SN74LV594ADBR
Texas Instruments

SN74F299DWR
Texas Instruments
BU4021BF-E2
Semiconductor Rohm

74AHCT164BQ-Q100X
Nexperia USA Inc.
74HCT597D-Q100J
Nexperia USA Inc.
SN74LV165APWT
Texas Instruments
SN74AHCT594DBR
Texas Instruments
74HC594D-Q100,118
Nexperia USA Inc.

CD74HC195NSR
Texas Instruments

74LVC594ABQ-Q100X
Nexperia USA Inc.

74AHCT164D-Q100J
Nexperia USA Inc.

74AHCT164PW-Q100J
Nexperia USA Inc.
NPIC6C596BQ-Q100,1
Nexperia USA Inc.
Envíe RFQ, le responderemos de inmediato.
