
LSM6DSOX マーキング、データシート、Adafruit | Arduino
- 解決: -
- センサータイプ: -
- 出力タイプ: -
- パッケージ: -


HK$250.00以上のご注文で送料無料

迅速な対応、迅速な見積もり

すぐに発送、アフターサービスも安心

オリジナルチャネル、本物の製品の保証
Getting Started with LSM6DSOX
Lsm6dsox
LSM6DSOXは、STマイクロエレクトロニクス社製の汎用6軸慣性センサで、3軸加速度センサと3軸ジャイロスコープを組み合わせることで直線加速度と角速度を計測します。動作追跡、姿勢監視、ナビゲーションなどのアプリケーションに最適です。加速度センサは±2g、±4g、±8g、±16gなどの異なる範囲を計測するように設定でき、ジャイロスコープは±125°/s~±2000°/sの範囲を計測できます。I²CまたはSPI経由のデジタル出力を備え、最大6KHzの高速データ出力レートを備えているため、リアルタイムアプリケーションに最適です。さらに、エネルギー効率に優れ、ポータブルデバイスやウェアラブルデバイス向けの低消費電力モードも提供しています。このセンサは、歩数カウントや自由落下検知などの動作検出機能もサポートしており、スマートガジェットに最適です。コンパクトな設計と高い電磁干渉耐性により、民生用と産業用の両方の環境での使用に最適です。
Lsm6dsox Pinout
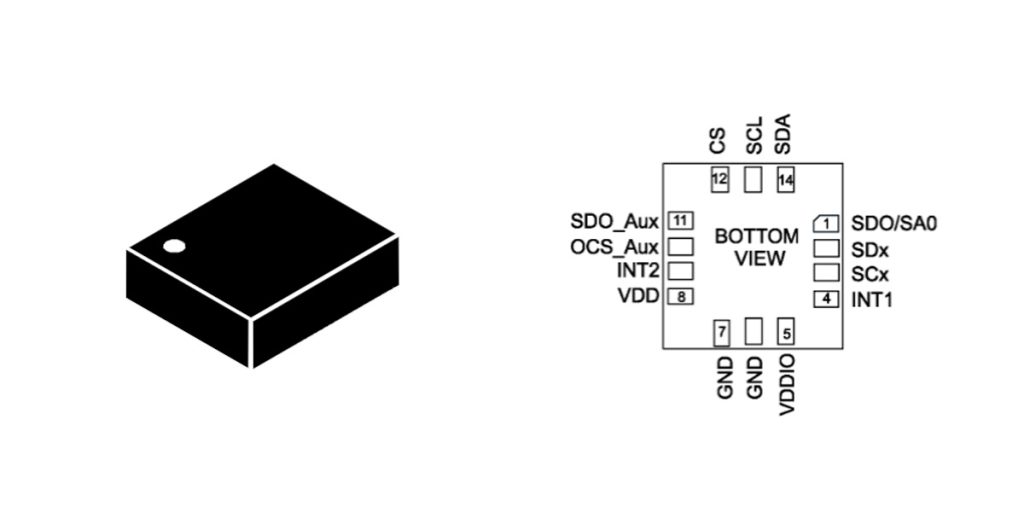
| ピン番号 | ピン名 | 機能説明 |
|---|---|---|
| 1 | VDD | 電源入力(3.3V) |
| 2 | GND | 地面 |
| 3 | SCL | I2Cクロックライン、またはSPIクロックライン |
| 4 | SDA | I2Cデータライン、またはSPIデータ入力(MISO) |
| 5 | CS | SPIチップセレクト(デバイスの起動に使用) |
| 6 | INT1 | 外部割り込み1出力 |
| 7 | INT2 | 外部割り込み2出力 |
| 8 | SD0 | I2Cデータライン、またはSPIデータ出力(MOSI) |
| 9 | VCAP | 内部電圧レギュレータコンデンサピン |
| 10 | SDO | SPIデータ出力 |
| 11 | SCK | SPIクロックライン |
| 12 | VDDIO | 電源入力(1.8Vまたは3.3Vをサポート) |
| 13 | ノースカロライナ州 | 接続なし、無視できます |
| 14 | RES / NC | 予約済みまたは接続なし(NCの場合はフローティングのままにする必要があります) |
LSM6DSOXを使用する際は、電源ピンを正しく接続してください。VDDピンには安定した3.3V電源を供給し、GNDピンはグランドに接続してください。VDDIOはI²CまたはSPIインターフェースに電源を供給するためのもので、コントローラに応じて通常は3.3Vまたは1.8Vに設定されています。
通信にはI²CとSPIの2つの選択肢があります。I²Cの場合は、クロックとデータ用にSCLピンとSDAピンを接続します。SPIモードでは、SCK、MISO、MOSI、CSピンを通信に使用します。
INT1およびINT2ピンは、歩行や自由落下の検出などの割り込み機能に使用されます。これらのピンには、外付けのプルアップ抵抗またはプルダウン抵抗が必要になる場合があります。
最後に、VCAPピンを忘れないでください。このピンにはコンデンサが接続され、内部電圧の安定化を図ります。NC(未接続)ピンには配線は必要ありません。
電圧設定が MCU の要件と一致していることを確認し、プロジェクトに適した通信インターフェイスを慎重に選択してください。
Lsm6dsox Equivalent Motion Sensor




| パラメータ | LSM6DSOX | LSM6DSL | MPU6050 | ICM-20608 |
|---|---|---|---|---|
| 加速範囲 | ±2g、±4g、±8g、±16g | ±2g、±4g、±8g、±16g | ±2g、±4g、±8g、±16g | ±2g、±4g、±8g、±16g |
| ジャイロスコープ範囲 | ±125°/秒、±250°/秒、±500°/秒、±1000°/秒、±2000°/秒 | ±125°/秒、±250°/秒、±500°/秒、±1000°/秒、±2000°/秒 | ±250°/秒、±500°/秒、±1000°/秒、±2000°/秒 | ±1000°/秒、±2000°/秒 |
| インターフェースタイプ | I2C、SPI | I2C、SPI | I2C、SPI | I2C、SPI |
| 解決 | 16ビット | 16ビット | 16ビット | 16ビット |
| 動作電圧 | 1.71V~3.6V | 1.8V~3.6V | 2.375V~3.46V | 2.4V~3.6V |
| 消費電流 | 1.2mA(加速度計とジャイロスコープ有効) | 0.7mA(加速度計とジャイロスコープ有効) | 3.9mA(加速度計とジャイロスコープ有効) | 3.9mA(加速度計とジャイロスコープ有効) |
| 内部機能 | 歩数計、自由落下検知、アクティビティ検知 | 歩数計、自由落下検知、アクティビティ検知 | 歩数計、自由落下検知、アクティビティ検知 | 歩数計、自由落下検知、アクティビティ検知 |
| パッケージタイプ | LGA-16 | LGA-16 | QFN-24 | LGA-24 |
| 動作温度範囲 | -40℃~+85℃ | -40℃~+85℃ | -40℃~+85℃ | -40℃~+85℃ |
LSM6DSOXの代替品を選ぶ際には、いくつか考慮すべき点があります。まず、センサの測定範囲と精度を確認し、アプリケーションのニーズに合致していることを確認してください。LSM6DSOX、LSM6DSL、MPU6050、ICM-20608はいずれも同様の加速度とジャイロスコープの範囲を備えていますが、特定の要件に適合していることを確認する必要があります。
低消費電力が不可欠な場合は、MPU6050 および ICM-20608 (3.9 mA) と比較して消費電力が低い (それぞれ 1.2 mA と 0.7 mA) LSM6DSOX および LSM6DSL が最適な選択肢です。
これらのセンサーはI²CとSPIもサポートしているため、通信プロトコルがシステムと互換性があることを確認してください。LSM6DSOXとLSM6DSLには、歩数カウントや自由落下検知などの機能が組み込まれており、より多くの機能を必要とするアプリケーションに最適です。
最後に、パッケージングにも注目してください。LSM6DSOXとLSM6DSLはLGA-16を使用していますが、MPU6050とICM-20608はQFN-24とLGA-24を使用しています。スペースが限られている場合は、QFN-24とLGA-24を考慮する必要があるかもしれません。
Lsm6dsox Motion Tracking Circuit
![]()
LSM6DSOXセンサーは、加速度計とジャイロスコープの両方を搭載し、3軸加速度と3軸角速度の測定が可能です。モーショントラッキングアプリケーションに最適です。I²CまたはSPI経由でESP32、STM32、Arduinoなどのマイクロコントローラに接続することで、センサーのデータを用いて動きを追跡できます。
ここで重要な役割を果たすのはINT1およびINT2割り込みピンで、歩数カウント、アクティビティモードの切り替え、転倒検出といったモーションイベントへのリアルタイム応答を提供します。これらの割り込みは、効率的なモーショントラッキングに不可欠です。
歩行検出やアクティビティ監視などの LSM6DSOX の機能を構成することで、ウェアラブル、スマートウォッチ、さらには仮想現実システム向けのアプリケーションを簡単に作成できます。
つまり、LSM6DSOXセンサーはI²CまたはSPI経由で接続することで、効果的なモーショントラッキングを実現します。モーションイベント応答用の割り込みピンを備えているため、トラッキングアプリケーションに最適で、プロジェクトにおける正確な動き検出に必要な正確なデータを提供します。
Lsm6dsox Sensor Hub Example
LSM6DSOXセンサーを使用すると、加速度計、ジャイロスコープ、さらには磁力計などの外部センサーなど、複数のセンサーを1つのデバイスに簡単に統合できます。これにより、生データを処理し、歩数カウント、動作認識、位置推定などのシンプルなセンサーフュージョンを実行できます。
センサーはI²CまたはSPIを介してメインコントローラー(MCUや組み込みシステムなど)と通信します。コントローラーはアルゴリズムを用いてデータを処理し、より高度な機能を実現するため、ウェアラブルデバイスなどのアプリケーションに最適です。
例えば、LSM6DSOXは歩数計測、自由落下検知、姿勢変化の検出などに使用できます。加速度計、ジャイロスコープ、磁力計のデータを組み合わせることで、包括的なモーショントラッキングシステムを構築できます。このシステムは、スマートバンド、グラス、その他のウェアラブルデバイスなど、様々なデバイスに使用でき、リアルタイムのトラッキングと動きの認識を実現します。
Lsm6dsox I2c Configuration
I²Cピン接続
| ピン名 | 機能説明 |
|---|---|
| SDA | データライン(I2Cデータ転送) |
| SCL | クロックライン(I2Cクロック) |
| VDD | 電源入力(通常3.3V) |
| GND | アース(接地) |
| CS | チップセレクトピン、I2Cモード(VDDまたは3.3Vに接続) |
| SDO/SA0 | I2Cアドレス選択ピン。VDDまたはGNDに接続されているときにI2Cアドレス0x6Aまたは0x6Bを選択するために使用されます。 |
LSM6DSOXセンサーをI²C通信用に設定する際には、いくつか重要な点があります。まず、SDAピンとSCLピンをそれぞれデータ用とクロック用に接続します。電源については、VDDを安定した3.3V電源に、グランド(GND)をシステムグランドに接続します。また、CSピンも使用します。I²Cモードでは、CSピンをハイレベル(VDD)に設定する必要があります。SDO/SA0ピンは、2つのI²Cアドレス(グランド接続時は0x6A、VDD接続時は0x6B)のいずれかを選択するのに役立ちます。
すべて接続したら、Wire for Arduinoなどのライブラリを使ってマイクロコントローラとの通信を初期化します。そこから、加速度センサーの範囲設定や生データの読み取りなど、様々なレジスタを設定できます。また、INT1ピンとINT2ピンを設定することで、足踏み検出や自由落下検出などの割り込みを設定することもできます。信頼性の高いデータ転送を実現するために、電圧が安定していることと、I²Cレートが適切に設定されていることを常に確認してください。
Lsm6dsox Arduino Sample Vode、
Arduino サンプルコード:
#含む// I²C通信をサポートするためにWireライブラリをインクルードします
#define LSM6DSOX_ADDRESS 0x6A // LSM6DSOXのデフォルトのI²Cアドレス
void セットアップ() {
Serial.begin(115200); // 115200ボーレートでシリアル通信を初期化する
Wire.begin(); // I²C通信を初期化する
// LSM6DSOXセンサーを初期化する
LSM6DSOX() を初期化します。
Serial.println(“LSM6DSOX I2Cの例”);
}
void loop() {
// 加速度計とジャイロスコープのデータを読み取ります
加速度計を読み取ります();
ジャイロスコープを読み取ります();
delay(500); // 500ミリ秒遅延
}
// LSM6DSOXセンサーを初期化する
void 初期化LSM6DSOX() {
Wire.beginTransmission(LSM6DSOX_ADDRESS);
Wire.write(0x10); // 加速度計範囲制御レジスタのアドレス
Wire.write(0x00); // 範囲を±2gに設定
Wire.endTransmission();
Wire.beginTransmission(LSM6DSOX_ADDRESS);
Wire.write(0x11); // ジャイロスコープ範囲制御レジスタのアドレス
Wire.write(0x00); // 範囲を±250°/sに設定
Wire.endTransmission();
}
// 加速度計データを読み取る
void 加速度計の読み取り() {
Wire.beginTransmission(LSM6DSOX_ADDRESS);
Wire.write(0x28); // 加速度計データレジスタアドレス
Wire.endTransmission();
Wire.requestFrom(LSM6DSOX_ADDRESS, 6); // 6バイトのデータを要求(軸ごとに2バイト)
int ax = (Wire.read() | (Wire.read() << 8)); // X軸データ
int ay = (Wire.read() | (Wire.read() << 8)); // Y軸データ
int az = (Wire.read() | (Wire.read() << 8)); // Z軸データ
Serial.print(“Accel X: “);
シリアル.print(ax);
Serial.print(”Y:“);
シリアル.print(ay);
シリアル.print(”Z:“);
シリアル.println(az);
}
// ジャイロスコープのデータを読み取る
void readGyroscope() {
Wire.beginTransmission(LSM6DSOX_ADDRESS);
Wire.write(0x22); // ジャイロスコープデータレジスタアドレス
Wire.endTransmission();
Wire.requestFrom(LSM6DSOX_ADDRESS, 6); // 6バイトのデータを要求(軸ごとに2バイト)
int gx = (Wire.read() | (Wire.read() << 8)); // X軸データ
int gy = (Wire.read() | (Wire.read() << 8)); // Y軸データ
int gz = (Wire.read() | (Wire.read() << 8)); // Z軸データ
Serial.print(“ジャイロX: “);
シリアル.print(gx);
Serial.print(”Y:“);
シリアル.print(gy);
シリアル.print(”Z:“);
シリアル.println(gz);
}
コードの説明:
I²C通信を開始するには、 ワイヤー.begin() 関数です。これにより、ArduinoがLSM6DSOXセンサーと正常に通信できるようになります。加速度計とジャイロスコープからデータを読み取るには、 Wire.requestFrom()加速度計とジャイロスコープはどちらも各軸に 16 ビット (2 バイト) があるため、合計 6 バイト (X、Y、Z 軸ごとに 2 バイト) を読み取る必要があります。
適切な制御レジスタを設定することで、センサーのレンジを設定できます。例えば、加速度センサーを±2g、ジャイロスコープを±250°/sに設定すれば、データはシリアルモニターに送信され、簡単に観察できるようになります。
の中で ループ() この機能により、センサーは500ミリ秒ごとにモーションデータを読み取り、表示し続けます。これは、LSM6DSOXをArduinoに接続するための優れた出発点であり、プロジェクトの具体的なニーズに合わせて範囲とサンプリングレートを調整できます。
Lsm6dsox Imu Integration With Stm32
LSM6DSOXをSTM32で動作させるには、I²C通信を設定する必要があります。まず、STM32とセンサー間の必要なピン(I²C通信用のSDA(データライン)とSCL(クロックライン))を接続し、電源とグランドが正しく接続されていることを確認してください。センサーはSTM32と同じ3.3V電源を使用しているので、これで準備完了です。
STM32のセットアップでは、STM32CubeMXを使ってI²Cを初期化し、クロック設定が正しいことを確認してください。HALライブラリを使ってセンサーとやり取りできます。データを読み取るには、センサーのレジスタから加速度計とジャイロスコープの値を要求し、それに応じてデータを処理します。加速度計は直線加速度を読み取り、ジャイロスコープは角速度を出力します。どちらもモーショントラッキングと方向検出に不可欠です。
すべての設定が完了すると、ウェアラブル デバイス、モーション トラッキング、ロボット工学などのプロジェクトに使用できるリアルタイムの読み取り値が得られます。
同様のもの

MT9V022IA7ATM-DR
オンセミ

MT9V022IA7ATC-DR
オンセミ
MT9V127IA3XTC-DR
オンセミ

AR0521SR2M09SURA0-DR
オンセミ
MT9V024IA7XTM-TP
オンセミ
カートに追加する

ACS781KLRTR-150B-T
アレグロマイクロシステムズ
02560990-000
TEコネクティビティ測定専門分野

ADIS16203CCCZ
アナログ・デバイセズ株式会社

RSF43HFP
Sensata-Cynergy3
DRV5055A4ELPGMQ1
テキサス・インスツルメンツ

EE-SX952-R 1M
オムロンオートメーション&セーフティ

FXTH8705116T1
NXP USA Inc.

20008458-00
TEコネクティビティ測定専門分野

ENV-20-DOX
アトラス・サイエンティフィック

M52173/12VDC
Eclipse Magnetics Ltd

PTS080502B500RPU00
ビシェイ・ベイシュラッグ/ドラロリック/BCコンポーネント

CMCP783A-M8
STI Vibration Monitoring
関連製品
MT9V022IA7ATM-DR
オンセミ
MT9V022IA7ATC-DR
オンセミ
MT9V127IA3XTC-DR
オンセミ
AR0521SR2M09SURA0-DR
オンセミ
MT9V024IA7XTM-TP
オンセミ
AR0522SRSM09SURA0-DP
オンセミ
AR0522SRSC09SURA0-DP
オンセミ
MT9V034C12STM-DR1
オンセミ
KAF-1001-AAA-CP-B1
オンセミ
KAF-1001-AAA-CB-B2
オンセミ
KAF-09000-ABA-DP-BA
オンセミ
KAF-09000-ABA-DD-BA
オンセミ

KAF-0402-ABA-CP-B2
オンセミ
MLX75023STF-BAB-001-TR
メレキシス・テクノロジーズNV
AR0522SRSM09SURA0-DR
オンセミ
AR0522SRSC09SURA0-DR
オンセミ
RFQ をお送りください。すぐに対応させていただきます。
